 Learn Metallurgy
Learn Metallurgymail@learnmetallurgy.com

In above figure, left figure shows a prismatic bar applied with a load 'P', which develops a total internal resisting force (R) on cross-section, and figure on right shows the free body diagram of left fig. Then the Stess can be define as the magnitude or intensity of internal resisting force developed at a point in a member under given load.
\[ \sigma = \frac{dF}{dA} \] \[ \textrm{ On Integration : } \int{dR} = R = \sigma \int{dA} \] \[ \Rightarrow R = \sigma A \] \[ \boxed{ \sigma_{avg} = \frac{R}{A} = \frac{P}{A} } \] Stress Vs Pressure :| Stress | Pressure |
|---|---|
| stress magnitude can be different in different direction | Same in every direction |
| Stress can't be measured | Pressure gauges can be use to measure pressure |
| Acts normal or along to the applied load | Acts normal to the surface |
| Stress may be tensile, compressive and shear | Pressure is always compressive |
| Stress is a Second order tensor | Pressure is a scalar quantity |
Engineering stress : It is the ratio of applied load at any instant to average original cross-sectional area. Engineering Stress is denoted S or \( \sigma_{e} \).
\[ S = \sigma_{e} = \frac{P}{A_{0}} \] Where P is applied load and \( A_{0} \) is Avg. Cross-sectional area
True stress : It is the ratio of applied load at any instant to instantaneous cross-sectional area. True Stress is denoted as \( \sigma_{T} \).
\[ \sigma_{T} = \frac{P}{A} \]
Where P is applied load and \( A \) is instantaneous Cross-sectional area
Units of Stress : Pa ( \( \frac{N}{m^2} \) ) , MPa ( \( 10^6 \frac{N}{m^2} \) = 1MPa ) , \( \frac{kgf}{cm^2} ( 1kgf = 9.81N \Rightarrow 1\frac{kgf}{cm^2} = 0.1MPa ) \)
Relation between True stress and Engineering stress:
\[ \sigma_{T} = \sigma_{e}( 1 + e ) \]
\( e \) = Engg. Strain
\( \sigma_{e} \) = Engg. Stress
\( \sigma_{T} \) = True Stress
Engineering strain : It is the ratio of change in dimension to original dimension om application of load. Engineering Strain is denoted e.
\[ e = \frac{\Delta L}{L_{0}} \]
Where \( \delta L \) is change in dimesion and \( L_{0} \) is original length
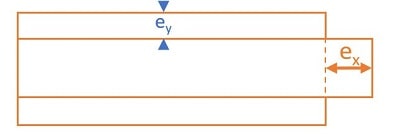 Longitudinal Strain \( (e_{x}) \) : It is the normal strain in the direction of applied load
Longitudinal Strain \( (e_{x}) \) : It is the normal strain in the direction of applied load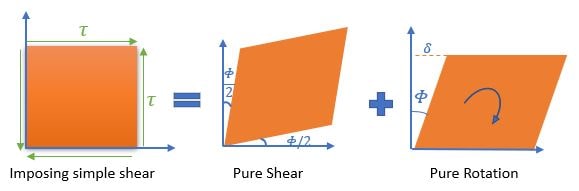
Shear strain is defined as the change in initial right angle between two lines elements which are parallel to x and y axes. The above figure shows the simple shear strain is a combination of pure shear and rotation. Shear strain can be calculated as \( \gamma = \phi^\textrm{shear angle} \)
\[ tan\phi^\textrm{shear angle} = \frac{\delta}{L} \]
\( \textrm{As }\phi \textrm{ is so small } \Rightarrow \phi = \frac{\delta}{L} \)
\[\boxed{ \gamma = \frac{\delta}{L} } \]
| Material | Independent Elastic Constant |
|---|---|
| Isotropic | 2 |
| Orthotropic | 9 |
| Anisotropic | 21 |
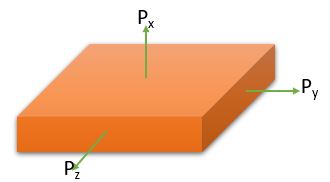 As mentioned earlier , Every longitudinal strain is associated with 2 lateral strain. For above case the longitudinal strain in x-direction \( \frac{\sigma_{x}}{E}\) is associated with 2 lateral strain \( -\frac{\mu \sigma_{x}}{E} \). So for all direction :
As mentioned earlier , Every longitudinal strain is associated with 2 lateral strain. For above case the longitudinal strain in x-direction \( \frac{\sigma_{x}}{E}\) is associated with 2 lateral strain \( -\frac{\mu \sigma_{x}}{E} \). So for all direction :
| \( \frac{Strain \rightarrow}{Load \downarrow} \) | X-Direction | Y-Direction | Z-Direction |
|---|---|---|---|
| Px | \( \frac{\sigma_{x}}{E}\) | \( -\frac{\mu \sigma_{x}}{E} \) | \( -\frac{\mu \sigma_{x}}{E} \) |
| Py | \( -\frac{\mu \sigma_{y}}{E} \) | \( \frac{\sigma_{y}}{E}\) | \( -\frac{\mu \sigma_{y}}{E} \) |
| Pz | \( -\frac{\mu \sigma_{z}}{E} \) | \( -\frac{\mu \sigma_{z}}{E} \) | \( \frac{\sigma_{z}}{E}\) |
LearnMetallurgy.com is dedicated to providing you unique and in-depth knowledge of the Metallurgical world. We regularly post blogs related to metallurgical field,jobs updates, and Provide Free Speed Test for GATE and PSUs.
Bengaluru, Karnataka
mail@learnmetallurgy.com
© 2021. All Rights Reserved. Sitemap Privacy Policy Term And Conditions Cancellation and Refund Policy